
Роботы и робототехнические наборы, совместимые с платформой Arduino
Собрать собственного робота — это мечта чуть ли не каждого мальчишки. Можно вспомнить и повальное увлечение роботами в Советском Союзе, особенно в годах, и попытки создать крутых терминаторов после одноимённого фильма, и даже целые турниры, где роботы сражались за первенство, уничтожая друг друга на арене. В общем, роботы увлекали людей со дня сборки первой модели. И если раньше для создания робота требовались большие деньги, много времени и сил, то теперь их сборка представляет собой конструктор.











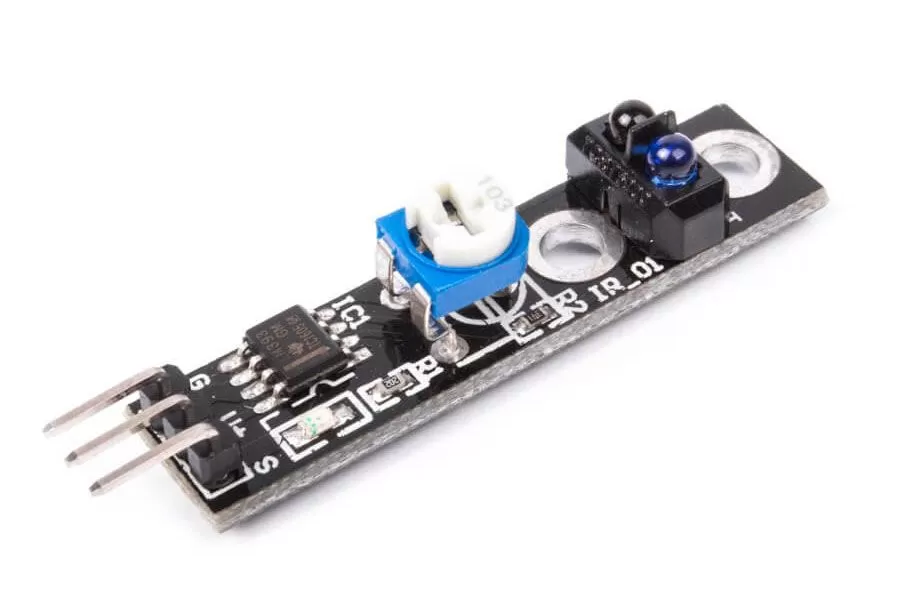
Отправить комментарий. Большой железный робот. Часть 3. Энкодеры и звук. Наш робот - не станок с ЧПУ, а учебная модель, с которой работают дети, поэтому энкодеры будем делать простые в изготовлении и наглядные в работе. В качестве датчиков будем использовать популярные Arduino Line Sensor KY , выглядят они вот так:.
- Самое популярное
- В прошлой части проекта мы создали шасси мобильного робота на ROS и запрограммировали управление движением.
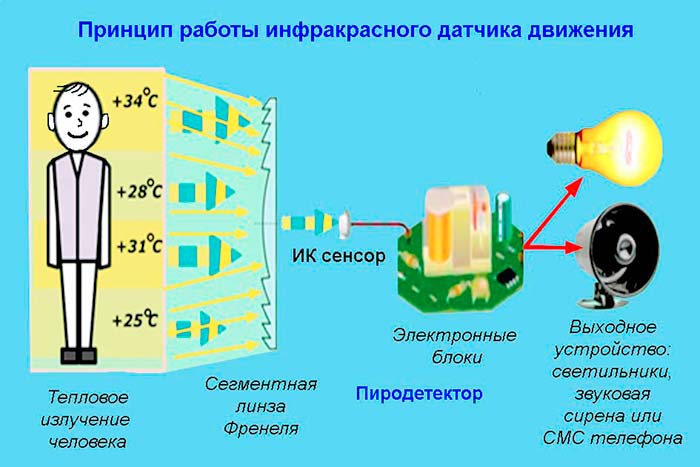
- В этой статье мы на подробном примере расскажем о том, как построить настоящего робота целиком на инфракструктуре ROS — Robot Operating System.
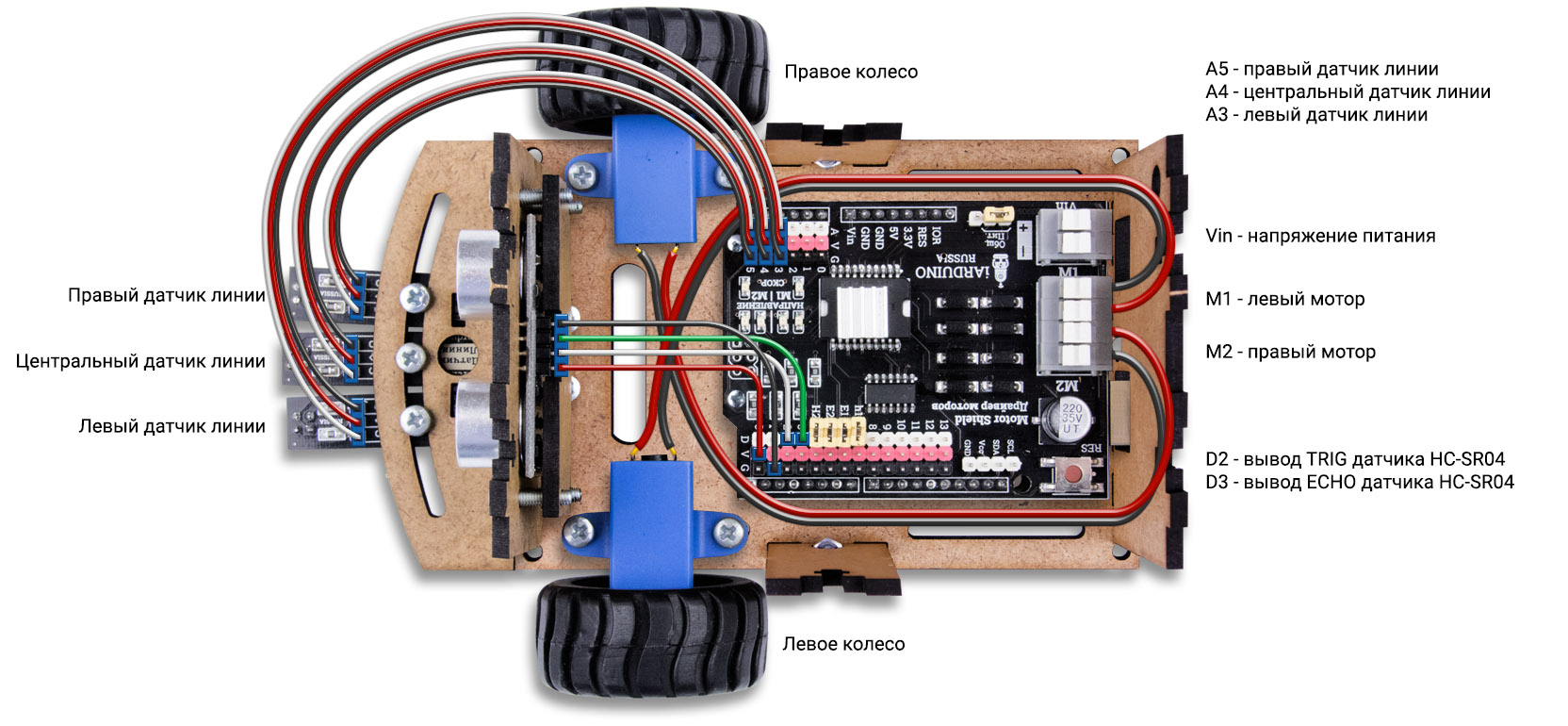
- Как научить робота видеть линию и двигаться вдоль неё?






В этой статье, с пошаговой инструкцией по сборке, вы сможете создать робота, объезжающего препятствие, на базе микроконтроллера Arduino , в домашних условиях. Если сенсор обнаружит препятствие, сервопривод позволит избежать столкновения. Сканируя пространство, робот выберет наиболее подходящее направления для объезда. Помимо платы и сенсора для настоящего робота, нам необходимы материалы:. Так же с инструментов вам понадобятся дрель, суперклей, отвертка, клеевой пистолет. Запитаем нашего робота 9В батарейкой крона , она компактная и дешевая , но через час она разрядится, потому, по желанию, вы можете запитать от аккумулятора на В.






Похожие статьи
- Надписи для цветов своими руками - Контрольно-измерительные приборы ОВЕН : датчики, контроллеры, рег
- Создание робота домашних условиях - ЖЕНСКАЯ ЛЕТНЯЯ ШАПОЧКЛЯ ДЕВОЧКИ Как
- Измеритель уровня в баке своими руками - Устройство для измерения уровня жидкости - КИП, датчики
- Как лечить гонартроз 3 степени